
Page 20 - Mechatronics for Safety, Security and Dependability in a New Era
P. 20
Ch01-I044963.fm Page 4 Monday, August 7, 2006 11:24 AM
Ch0 1-I044963 .fm
4 Page 4 Monday, August 7, 2006 11:24 AM
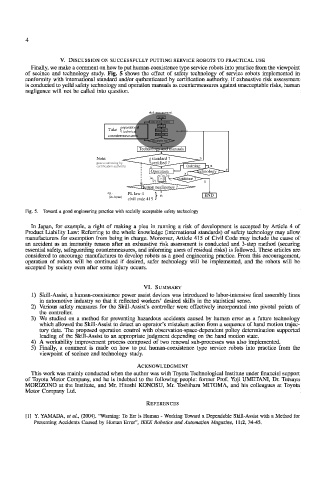
V. DISCUSSION ON SUCCESSFULLY PUTTING SERVICE ROBOTS TO PRACTICAL USE
Finally, we make a comment on how to put human-coexistence type service robots into practice from the viewpoint
of sccincc and technology study. Fig. 5 shows the effect of safety technology of service robots implemented in
conformity with international standard and/or quthenticated by certification authority. If exhaustive risk assessment
is conducted to yeild safety technology and operation manuals as countermeasures against unacceptable risks, human
negligence will not be called into question.
risk assessment
START
Clarify operating condition
Find risk
operational
Take Estimate risk
technical
countermeasures Evaluate risk
acceptable risk ?
Technology and manuals
Note:
Note: standard ? n
pass a screening by
pass a screening by certified ?
certification
authority
certification authority y training n
technology ? y
y
> > >< >< > continue ?
Operation >
> > > > n
Human negligence ?
eg . PL law 4 T T END
eg.
PLlaw4
(in Japan)
(in Japan) P Lla w 4 , _ J n n
civil code 415
civil code 415
ode 415
Fig. 5. Toward a good engineering practice with socially acceptable safety technology
In Japan, for example, a right of making a pica in running a risk of development is accepted by Article 4 of
Product Liability Law: Referring to the whole knowledge (international standards) of safety technology may allow
manufacturers for exemption from being in charge. Moreover, Article 415 of Civil Code may include the cause of
an accident as an immunity reason after an exhaustive risk assessment is conducted and 3-step method (securing
essential safely, safeguarding counlcrmcasurcs, and informing users of residual risks) is followed. These articles arc
considered to encourage manufactures to develop robots as a good engineering practice. From this encouragement,
operation of robots will be continued if desired, safer technology will be implemented, and the robots will be
accepted by society even after some injury occurs.
VI. SUMMARY
1) Skill-Assist, a human-coexistence power assist devices was introduced to labor-intensive final assembly lines
in automotive industry so that it reflected workers' desired skills in the statistical sense.
2) Various safety measures for the Skill-Assist's controller were effectively incorporated into pivotal points of
the controller.
3) We studied on a method for preventing hazardous accidents caused by human error as a future technology
which allowed the Skill-Assist to delect an operator's mislaken action from a sequence of hand motion trajec-
tory data. The proposed operation control with observation-space-dependent policy determination supported
leading of the Skill-Assist to an appropriate judgment depending on the hand motion state.
4) A workability improvement process composed of two renewal sub-processes was also implemented.
5) Finally, a comment is made on how to put human-coexistence type service robots into practice from the
viewpoint of sceince and technology study.
ACKNOWLEDGMENT
This work was mainly conducted when the author was with Toyota Technological Institute under financial support
of Toyota Motor Company, and he is indebted to the following people: former Prof. Yoji UMETANI, Dr. Tetsuya
MORIZONO at the Institute, and Mr. Hitoshi KONOSU, Mr. Toshiharu MITOMA, and his colleagues at Toyota
Motor Company Ltd.
REFERENCES
[1] Y. YAMADA, e1 a/., (2004). "Warning: To Err is Human - Working Toward a Dependable Skill-Assist with a Method for
Preventing Accidents Caused by Human Error", IEEE Robotics and Automation Magazine, 11:2, 34-45.