
Page 38 - Mechatronics for Safety, Security and Dependability in a New Era
P. 38
Ch05-I044963.fm Page 22 Tuesday, August 1, 2006 5:42 PM
Ch05-I044963.fm
22 22 Page 22 Tuesday, August 1, 2006 5:42 PM
(5) (6) (5) (6)
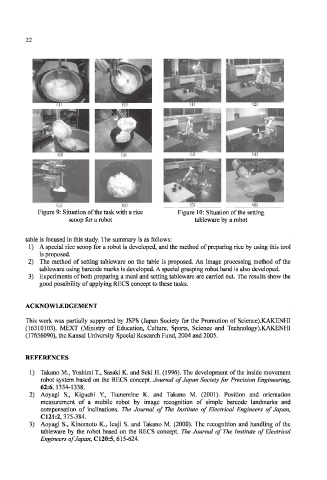
Figure 9: Situation of the task with a rice Figure 10: Situation of the setting
scoop for a robot tableware by a robot
table is focused in this study. The summary is as follows:
1) A special rice scoop for a robot is developed, and the method of preparing rice by using this tool
is proposed.
2) The method of setting tableware on the table is proposed. An image processing method of the
tableware using barcode marks is developed. A special grasping robot hand is also developed.
3) Experiments of both preparing a meal and setting tableware are carried out. The results show the
good possibility of applying RECS concept to these tasks.
ACKNOWLEDGEMENT
This work was partially supported by JSPS (Japan Society for the Promotion of Science).KAKENHI
(16310103), MEXT (Ministry of Education, Culture, Sports, Science and Technology).KAKENHI
(17656090), the Kansai University Special Research Fund, 2004 and 2005.
S
REFERENCE
1) Takano M., Yoshimi T., Sasaki K. and Seki H. (1996). The development of the inside movement
robot system based on the RECS concept. Journal of Japan Society for Precision Engineering,
62:6,1334-1338.
2) Aoyagi S., Kiguchi Y., Tsunemine K. and Takano M. (2001). Position and orientation
measurement of a mobile robot by image recognition of simple barcode landmarks and
compensation of inclinations. The Journal of The Institute of Electrical Engineers of Japan,
C121:2, 375-384.
3) Aoyagi S., Kinomoto K., leuji S. and Takano M. (2000). The recognition and handling of the
tableware by the robot based on the RECS concept. The Journal of The Institute of Electrical
Engineers of Japan, C120:5, 615-624.