
Page 55 - Mechatronics for Safety, Security and Dependability in a New Era
P. 55
Ch09-I044963.fm Page 39 Tuesday, July 25, 2006 11:58 AM
11:58 AM
Page 39
Tuesday, July 25,2006
Ch09-I044963.fm
39 39
one roller axis, and measures propulsion velocity. An oscilloscope puts in front of wheelchair to
provide visual feedback of propulsion velocity and reference velocity as control objectives. A
wireless heart rate monitor (Polar Erectro oy, Finland) records heart rate (HR [bmp]) during
wheelchair propulsion.
We asked one subject to tiy a propelling test on grounds that subject of this research might need heavy
work in some case on the test. The subject was a healthy 22 years old woman, weighting of 56 [kg],
with a resting heart rate (RHR [bpm]) of 64 [bpm].
Test Protocol
In order to measure the propelling torque to the propelling velocity and evaluate human fatigue during
wheelchair propulsion under different inertia, a subject was asked to propel the test wheelchair on the
equipment, and in the follow-up test. The follow-up test is a test tracking and fixing the propulsion
velocity at the reference velocity, for using displayed the voltage signal value of both velocities on the
oscilloscope. A subject propelled the wheelchair for 6 minutes at a set constant velocity. Subjects
were at rest while seated for about 15 minuets before testing. Six minutes was enough time to attain a
steady heart rate. The data gave the propelling torque and the propulsion velocity, by determined at
the respective velocity (from 0 to 4.0 km/h and every 5 km/h), and changing inertia applied by
flywheels adjustment, that is a value on rear wheel axis is equated with the total mass of an operator
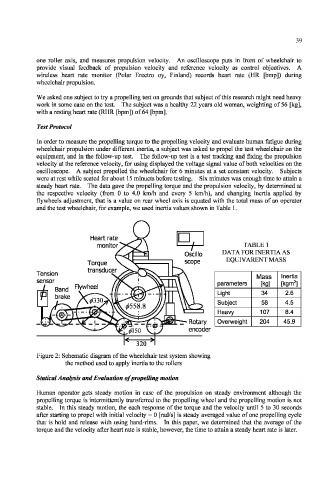
and the test wheelchair, for example, we used inertia values shown in Table 1.
TABLE 1
DATA FOR INERTIA AS
EQUIVARENT MASS
Tension
Mass Inertia
sensor parameters [kg] [kgm ]
2
Band F l r h e e l
Light 34 2.6
brake
Subject 58 4.5
Heavy 107 8.4
Rotary Overweight 204 45.9
encoder
320
Figure 2: Schematic diagram of the wheelchair test system showing
the method used to apply inertia to the rollers
Statical Analysis and Evaluation of propelling motion
Human operator gets steady motion in case of the propulsion on steady environment although the
propelling torque is intermittently transferred to the propelling wheel and the propelling motion is not
stable. In this steady motion, the each response of the torque and the velocity until 5 to 30 seconds
after starting to propel with initial velocity = 0 [rad/s] is steady averaged value of one propelling cycle
that is hold and release with using hand-rims. In this paper, we determined that the average of the
torque and the velocity after heart rate is stable, however, the time to attain a steady heart rate is later.