
Page 60 - Mechatronics for Safety, Security and Dependability in a New Era
P. 60
Ch10-I044963.fm Page 44 Tuesday, August 1, 2006 8:42 PM
Ch10-I044963.fm
44
44 Page 44 Tuesday, August 1, 2006 8:42 PM
regulate the movement of the wheelchairs. Our final purpose of this study develops the controller for
high assisted and very safe wheelchairs. To achieve it, we need attendant's model to develop the
controller. In this paper, we propose, identify and validate the model with experiments
MODELING FOR ATTENDANT PROPELLING
There are some previous studies to investigate the propelling behaviour: Resnick (1995) studied the
maximal and sub-maximal condition of propelling carts. Al-Eisawi (1999) studied the steady load of
propelling manual carts on some road surfaces, but attendant's models have been not proposed until
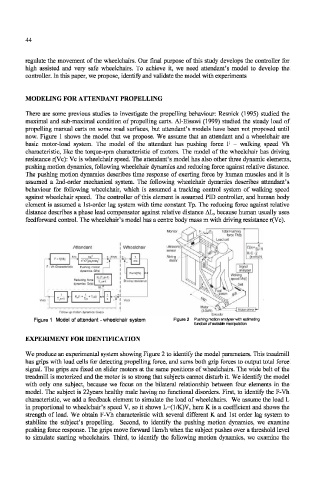
now. Figure 1 shows the model that we propose. We assume that an attendant and a wheelchair are
basic motor-load system. The model of the attendant has pushing force F - walking speed Vh
characteristic, like the torque-rpm characteristic of motors. The model of the wheelchair has driving
resistance r(Vc): Vc is wheelchair speed. The attendant's model has also other three dynamic elements,
pushing motion dynamics, following wheelchair dynamics and reducing force against relative distance.
The pushing motion dynamics describes time response of exerting force by human muscles and it is
assumed a 2nd-order mechanical system. The following wheelchair dynamics describes attendant's
behaviour for following wheelchair, which is assumed a tracking control system of walking speed
against wheelchair speed. The controller of this element is assumed PID controller, and human body
element is assumed a lst-order lag system with time constant Tp. The reducing force against relative
distance describes a phase lead compensator against relative distance AL, because human usually uses
feedforward control. The wheelchair's model has a centre body mass m with driving resistance r(Vc).
Total Pushing
force Fh(t)
Load cell
Wheelchair
Sign
analyzer
Walking
m speed Vh(t)
Belt
1
V+1 - K p (1+ ^ + T Ds)
Follow up motion dynamics Gw(s)
Figure 1 Model of attendant - wheelchair system Figure 2 Pushing motion analyzerwith estimating
function of suitable manipulation
EXPERIMENT FOR IDENTIFICATION
We produce an experimental system showing Figure 2 to identify the model parameters. This treadmill
has grips with load cells for detecting propelling force, and sums both grip forces to output total force
signal. The grips are fixed on slider motors at the same positions of wheelchairs. The wide belt of the
treadmill is motorized and the motor is so strong that subjects cannot disturb it. We identify the model
with only one subject, because we focus on the bilateral relationship between four elements in the
model. The subject is 22years healthy male having no functional disorders. First, to identify the F-Vh
characteristic, we add a feedback element to simulate the load of wheelchairs. We assume the load L
in proportional to wheelchair's speed V, so it shows L=(1/K)V, here K is a coefficient and shows the
strength of load. We obtain F-Vh characteristic with several different K and 1st order lag system to
stabilize the subject's propelling. Second, to identify the pushing motion dynamics, we examine
pushing force response. The grips move forward lkm/h when the subject pushes over a threshold level
to simulate starting wheelchairs. Third, to identify the following motion dynamics, we examine the