
Page 100 -
P. 100
Ch18-I044963.fm Page 83 Tuesday, August 1, 2006 2:59 PM
1, 2006
2:59 PM
Page 83
Tuesday, August
Ch18-I044963.fm
83 83
P12
P 14
P 13
P 12 P13 Jfeli P 15 A O
\
"4.x-* • u 5,x x
u 4,x
u 5,
P 8 P8 P P9 yt^io \ Pn u 4,y •"5.
P 9
"4.y-*
P 11
P 10
u 5,y y
"3.x-*
u 3,x • u 6,x x
u 6,
u 3,y • u 6,
"3.y-*
u 6,y y
P 5
P 7
P 4 P5 P 6 p?
u
14,x
u 14,x • u 10,
u 10,x x
u 14,y • u 10,
u 10,y y
P 0 P0 P P1 P 2 P 3
P 1
(a) guidance to desired points
P 12 P13 P 14 P15 A
P 15
P 13
P14
P12
o
u 4,x *
"4.X- • u 5,x x
u 5,
P 8 P 9 P 10 P11
P 11
"3.x"*
u 6,x x
u 3,x • u 6,
P 4 P 5 P 6 P 7
u 14,x " • u 10,
u 10,x x
"14.X-
P 0 P 1 P 2 P 3
(b) guidance to desired lines
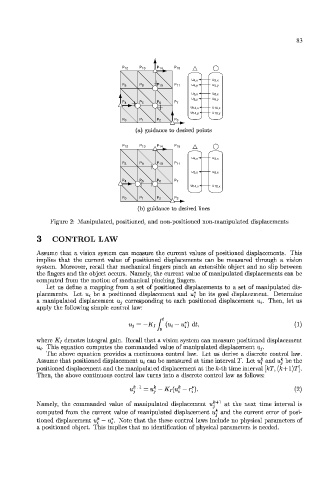
Figure 2: Manipulated, positioned, and non-positioned non-manipulated displacements
3 CONTROL LAW
Assume that a vision system can measure the current values of positioned displacements. This
implies that the current value of positioned displacements can be measured through a vision
system. Moreover, recall that mechanical fingers pinch an extensible object and no slip between
the fingers and the object occurs. Namely, the current value of manipulated displacements can be
computed from the motion of mechanical pinching fingers.
Let us define a mapping from a set of positioned displacements to a set of manipulated dis-
placements. Let Ui be a positioned displacement and u* be its goal displacement. Determine
a manipulated displacement ?;,,- corresponding to each positioned displacement «,-. Then, let us
apply the following simple control law:
- «*) At,
(u t (1)
where Kj denotes integral gain. Recall that a vision system can measure positioned displacement
?/,,. This equation computes the commanded value of manipulated displacement Uj.
The above equation provides a continuous control law. Let us derive a discrete control law.
Assume that positioned displacement «,; can be measured at time interval T. Let uf and u* be the
positioned displacement and the manipulated displacement at the A;-th time interval [kT, (k- l)T],
Then, the above continuous control law turns into a discrete control law as follows:
«,*+'=„*-#,(„*-,-•). (2)
Namely, the commanded value of manipulated displacement u,; + at the next time interval is
k
computed from the current value of manipulated displacement u , and the current error of posi-
tioned displacement u\ — u*. Note that the these control laws include no physical parameters of
a positioned object. This implies that no identification of physical parameters is needed.