
Page 105 -
P. 105
Ch19-I044963.fm Page 88 Tuesday, August 1, 2006 2:54 PM
Ch19-I044963.fm
88 Page 88 Tuesday, August 1, 2006 2:54 PM
REPRESENTATION OF KNOTTING/UNKNOTTING PROCESS
In this section, we propose a representation method of knotting/unknotting of a deformable linear
object. First, let us project the 3D shape of a linear object on a plane. The projected 2D curve may
cross with itself. Crossings in the projected curve can specify the crossing state. Next, let us number
crossings along the projected curve from one endpoint to the other. One endpoint of the projected
curve is defined as the left endpoint E ;, and the other is defined as the right endpoint E r in this paper. In
addition, whether each crossing is involved in the upper part or in the lower part is specified. Symbol
C", describes the r-th crossing point is involved in the upper part while C', denotes it is in the lower part.
Furthermore, we categorize the crossings into two: left-handed helical crossing C", and right-handed
+
helical crossing C ,. The sequence of symbols at individual crossing points determines the crossing
states of a linear object. Let us describe a segment between C, and C^ as '',-L*- where p and q indicate
whether the segment is an upper part (then p,q=u) or a lower part (then p,q=l) at crossing C, and C y.
q
Terminal segments adjoining the left and the right endpoints are described as W l and jL, respectively.
Consequently, we can represent the crossing states of a knotted linear object by a sequence of crossing
point symbols.
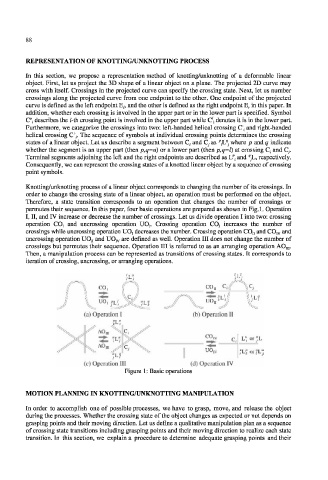
Knotting/unknotting process of a linear object corresponds to changing the number of its crossings. In
order to change the crossing state of a linear object, an operation must be performed on the object.
Therefore, a state transition corresponds to an operation that changes the number of crossings or
permutes their sequence. In this paper, four basic operations are prepared as shown in Fig.l. Operation
I, II, and IV increase or decrease the number of crossings. Let us divide operation I into two: crossing
operation CO, increases the number of
crossings while uncrossing operation UO, decreases the number. Crossing operation CO U and CO, V and
uncrossing operation UO n and UO, V are defined as well. Operation III does not change the number of
crossings but permutes their sequence. Operation III is referred to as an arranging operation AO 1U.
Then, a manipulation process can be represented as transitions of crossing states. It corresponds to
iteration of crossing, uncrossing, or arranging operations.
1
Li.
CO, C « if ^\ v, C
1 I
\C,//
(a) Operation I (b) Operation II
AO IT
CO,, l
"L" L] or 'L
AO,, c, ^
UO,, fU'orfL"
(c) Operation III (d) Operation IV
Figure 1: Basic operations
MOTION PLANNING IN KNOTTTNG/UNKNOTTING MANIPULATION
In order to accomplish one of possible processes, we have to grasp, move, and release the object
during the processes. Whether the crossing state of the object changes as expected or not depends on
grasping points and their moving direction. Let us define a qualitative manipulation plan as a sequence
of crossing state transitions including grasping points and their moving direction to realize each state
transition. In this section, we explain a procedure to determine adequate grasping points and their