
Page 163 - Modern Control of DC-Based Power Systems
P. 163
Control Approaches for Parallel Source Converter Systems 127
Synergetic control Calculation of duty cycle
V bus n Manifold Stability
; I
conditions d (V bus , I , Ψ , Ʒ )
i
n
i
Ψ i
Ʒ i
Measurements Plant Control signal
generators and loads
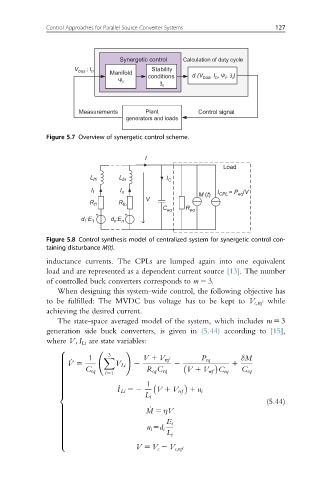
Figure 5.7 Overview of synergetic control scheme.
I
Load
L
L f1 fn I C
I
I 1 n I = P /V
M (t) CPL eq
V
R f1 R fn
C eq R eq
d ·E 1 d ·E n
1
n
Figure 5.8 Control synthesis model of centralized system for synergetic control con-
taining disturbance M(t).
inductance currents. The CPLs are lumped again into one equivalent
load and are represented as a dependent current source [13]. The number
of controlled buck converters corresponds to m 5 3.
When designing this system-wide control, the following objective has
to be fulfilled: The MVDC bus voltage has to be kept to V c;ref while
achieving the desired current.
The state-space averaged model of the system, which includes m 5 3
generation side buck converters, is given in (5.44) according to [15],
where V; I Li are state variables:
8 !
3
1 δM
> X V 1 V ref P eq
_ V 5
>
> V Li 2 1
> 2
C eq R eq C eq V 1 V ref C eq C eq
>
>
> i51
>
>
>
>
I Li 52
> 1
> _
> V 1 V ref 1 u i
>
L i
<
(5.44)
_ M 5 ηV
>
>
>
>
>
>
> E i
>
> u i 5d i
>
L i
>
>
>
>
>
:
V 5 V c 2 V c;ref