
Page 194 - Modern Control of DC-Based Power Systems
P. 194
158 Modern Control of DC-Based Power Systems
21 0
2 3
AB 1
L ext 5 4 5 (5.131)
c 0
c k
The set-point adaptation term is added to the nominal state and added
to the nominal set-point values to form the control variables of the two
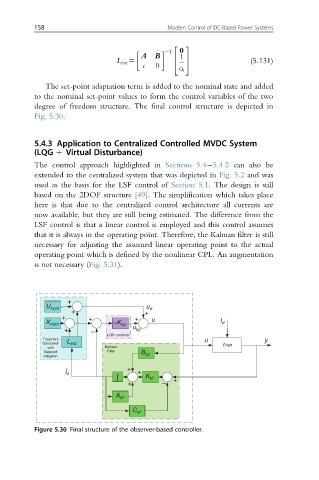
degree of freedom structure. The final control structure is depicted in
Fig. 5.30.
5.4.3 Application to Centralized Controlled MVDC System
(LQG 1 Virtual Disturbance)
The control approach highlighted in Sections 5.4 5.4.2 can also be
extended to the centralized system that was depicted in Fig. 5.2 and was
used as the basis for the LSF control of Section 5.1. The design is still
based on the 2DOF structure [49]. The simplification which takes place
here is that due to the centralized control architecture all currents are
now available, but they are still being estimated. The difference from the
LSF control is that a linear control is employed and this control assumes
that it is always in the operating point. Therefore, the Kalman filter is still
necessary for adjusting the assumed linear operating point to the actual
operating point which is defined by the nonlinear CPL. An augmentation
is not necessary (Fig. 5.31).
+
U nom u d
+ +
+ + + u
X nom –K lqr I d
+ – u lqr
LQR controller
Trajectory L u y
Generator ext Plant
with Kalman
Setpoint Filter B
Adaption lqr
+
∫ K kf
Î d +
+ – +
A kf
C kf
Figure 5.30 Final structure of the observer-based controller.