
Page 109 - Modern Robotics Building Versatile Macines
P. 109
THOUGHTFUL ROBOTS 89
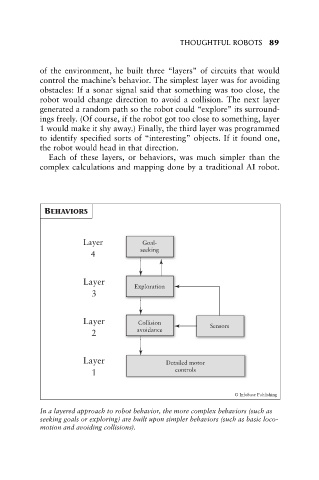
of the environment, he built three “layers” of circuits that would
control the machine’s behavior. The simplest layer was for avoiding
obstacles: If a sonar signal said that something was too close, the
robot would change direction to avoid a collision. The next layer
generated a random path so the robot could “explore” its surround-
ings freely. (Of course, if the robot got too close to something, layer
1 would make it shy away.) Finally, the third layer was programmed
to identify specified sorts of “interesting” objects. If it found one,
the robot would head in that direction.
Each of these layers, or behaviors, was much simpler than the
complex calculations and mapping done by a traditional AI robot.
In a layered approach to robot behavior, the more complex behaviors (such as
seeking goals or exploring) are built upon simpler behaviors (such as basic loco-
motion and avoiding collisions).