
Page 61 - Modern Robotics Building Versatile Macines
P. 61
LEARNING TO WALK 41
laboratory floor. A year later, a more humanlike bipedal machine
could run while changing gaits. This improvement reflected a
growing understanding of the fundamental elements involved in
legged locomotion.
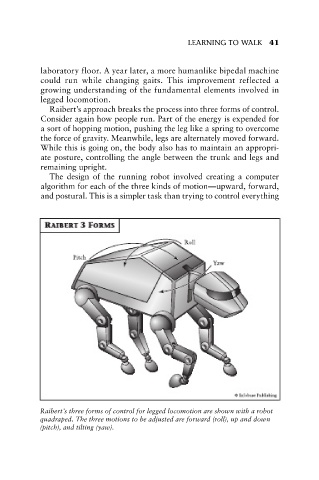
Raibert’s approach breaks the process into three forms of control.
Consider again how people run. Part of the energy is expended for
a sort of hopping motion, pushing the leg like a spring to overcome
the force of gravity. Meanwhile, legs are alternately moved forward.
While this is going on, the body also has to maintain an appropri-
ate posture, controlling the angle between the trunk and legs and
remaining upright.
The design of the running robot involved creating a computer
algorithm for each of the three kinds of motion—upward, forward,
and postural. This is a simpler task than trying to control everything
Raibert’s three forms of control for legged locomotion are shown with a robot
quadraped. The three motions to be adjusted are forward (roll), up and down
(pitch), and tilting (yaw).