
Page 215 -
P. 215
198 Computed-Torque Control
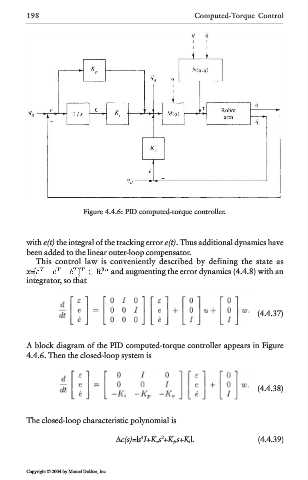
Figure 4.4.6: PID computed-torque controller.
with e(t) the integral of the tracking error e(t). Thus additional dynamics have
been added to the linear outer-loop compensator.
This control law is conveniently described by defining the state as
x= and augmenting the error dynamics (4.4.8) with an
integrator, so that
(4.4.37)
A block diagram of the PID computed-torque controller appears in Figure
4.4.6. Then the closed-loop system is
(4.4.38)
The closed-loop characteristic polynomial is
2
∆c(s)=|s I+K v s +K p s+K i |. (4.4.39)
3
Copyright © 2004 by Marcel Dekker, Inc.