
Page 300 -
P. 300
5.2 Feedback-Linearization Controllers 285
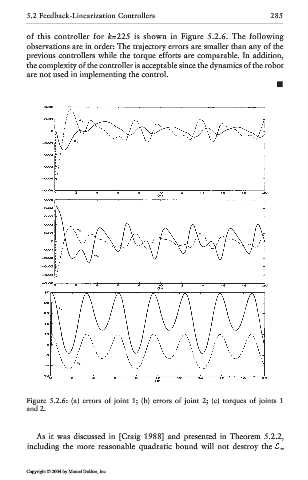
of this controller for k=225 is shown in Figure 5.2.6. The following
observations are in order: The trajectory errors are smaller than any of the
previous controllers while the torque efforts are comparable. In addition,
the complexity of the controller is acceptable since the dynamics of the robot
are not used in implementing the control.
Figure 5.2.6: (a) errors of joint 1; (b) errors of joint 2; (c) torques of joints 1
and 2.
As it was discussed in [Craig 1988] and presented in Theorem 5.2.2,
including the more reasonable quadratic bound will not destroy the ∞
Copyright © 2004 by Marcel Dekker, Inc.