
Page 182 - Robots Androids and Animatrons : 12 Incredible Projects You Can Build
P. 182
FROM
4028 3 IN V cc 14 V cc C5
2
IC1-a .2
5 1/2 4013 4
1
OUT R16
47K
6 7
V cc
R
R18 L
1K
Q1
TIP120
A
V cc
R L
D11
1N914
AC
OR RY1 Q2 161
DC
R19 TIP120
SOURCE
1K
B
R20
180Ω
IC1 R L
MOC3010
60Hz
TR1 120V
C
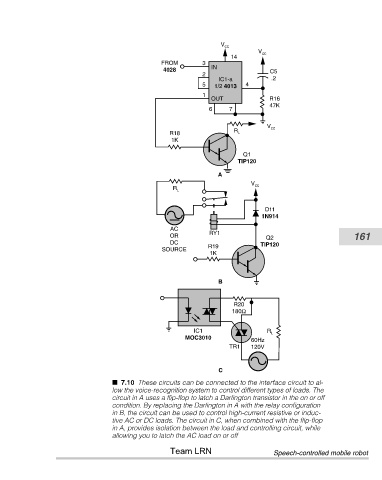
7.10 These circuits can be connected to the interface circuit to al-
low the voice-recognition system to control different types of loads. The
circuit in A uses a flip-flop to latch a Darlington transistor in the on or off
condition. By replacing the Darlington in A with the relay configuration
in B, the circuit can be used to control high-current resistive or induc-
tive AC or DC loads. The circuit in C, when combined with the flip-flop
in A, provides isolation between the load and controlling circuit, while
allowing you to latch the AC load on or off
Team LRN Speech-controlled mobile robot