
Page 131 - Schaum's Outline of Theory and Problems of Applied Physics
P. 131
116 ROTATIONAL MOTION [CHAP. 10
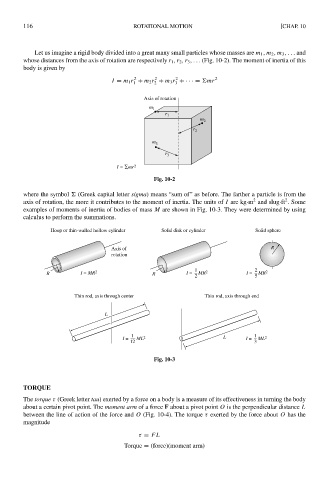
Let us imagine a rigid body divided into a great many small particles whose masses are m 1 , m 2 , m 3 ,... and
whose distances from the axis of rotation are respectively r 1 ,r 2 ,r 3 ,... (Fig. 10-2). The moment of inertia of this
body is given by
2
2
2
I = m 1 r + m 2 r + m 3 r +· · · = mr 2
2
3
1
Axis of rotation
m 1
r 1
m 2
r 2
m 3
r 3
I = ∑mr 2
Fig. 10-2
where the symbol (Greek capital letter sigma) means “sum of” as before. The farther a particle is from the
2
2
axis of rotation, the more it contributes to the moment of inertia. The units of I are kg·m and slug·ft . Some
examples of moments of inertia of bodies of mass M are shown in Fig. 10-3. They were determined by using
calculus to perform the summations.
Hoop or thin-walled hollow cylinder Solid disk or cylinder Solid sphere
Axis of R
rotation
1 2
R I = MR 2 R I = 2 MR 2 I = 5 MR 2
Thin rod, axis through center Thin rod, axis through end
L
1 1
I = ML 2 L I = ML 2
12 3
Fig. 10-3
TORQUE
The torque τ (Greek letter tau) exerted by a force on a body is a measure of its effectiveness in turning the body
about a certain pivot point. The moment arm of a force F about a pivot point O is the perpendicular distance L
between the line of action of the force and O (Fig. 10-4). The torque τ exerted by the force about O has the
magnitude
τ = FL
Torque = (force)(moment arm)