
Page 317 - Schaum's Outline of Theory and Problems of Signals and Systems
P. 317
FOURIER ANALYSIS OF DISCRETE-TIME SIGNALS AND SYSTEMS [CHAP. 6
Let H,(s) and HJz) be the system functions of the continuous-time and discrete-time
systems, respectively (Fig. 6-51. Let
Then from Eqs. (3.1) and (4.1) we have
y (t ) = H,( jw ) elw' Y[n] = H~(~JW~) (6.88)
eJnwTs
Thus, the requirement y[n] = y(nTs) leads to the condition
H,(jo) eJnwT, = Hd(ejwK) e~nwrs
from which it follows that
H,(jw) = Hd(ejwT1)
In terms of the Fourier transform, Eq. (6.89) can be expressed as
HA4 = HdW) R = wTs (6.90)
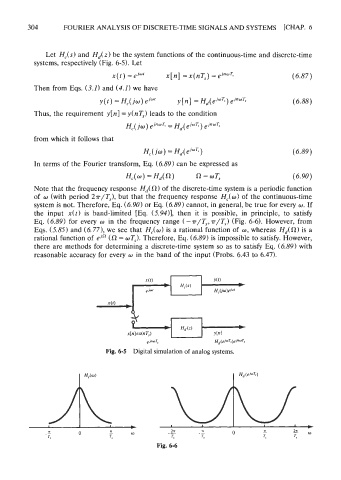
Note that the frequency response Hd(R) of the discrete-time system is a periodic function
of w (with period 27r/Ts), but that the frequency response H,(o) of the continuous-time
system is not. Therefore, Eq. (6.90) or Eq. (6.89) cannot, in general, be true for every w. If
the input x(t) is band-limited [Eq. (5.9411, then it is possible, in principle, to satisfy
Eq. (6.89) for every w in the frequency range (-rr/Ts,r/Ts) (Fig. 6-6). However, from
Eqs. (5.85) and (6.771, we see that Hc(w) is a rational function of w, whereas Hd(R) is a
rational function of eJn (R = wT,). Therefore, Eq. (6.89) is impossible to satisfy. However,
there are methods for determining a discrete-time system so as to satisfy Eq. (6.89) with
reasonable accuracy for every w in the band of the input (Probs. 6.43 to 6.47).
Fig. 6-5 Digital simulation of analog systems.
"
-- 2n - - 0 n - 2n
- lo
T, T, T, r,
Fig. 6-6