
Page 133 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 133
108 MOTION PLANNING FOR A MOBILE ROBOT
a 9
r u
T
a 8
a 6 b 4
a 7
C a 11
a 10
b 3
a 5
a 4
b 2
b 1
a 2
a 3
a 1
S
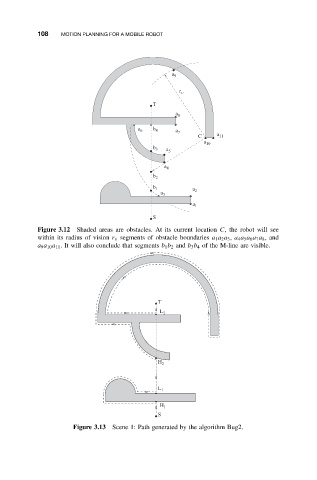
Figure 3.12 Shaded areas are obstacles. At its current location C, the robot will see
within its radius of vision r v segments of obstacle boundaries a 1 a 2 a 3 , a 4 a 5 a 6 a 7 a 8 ,and
a 9 a 10 a 11 . It will also conclude that segments b 1 b 2 and b 3 b 4 of the M-line are visible.
T
L 2
H 2
L 1
H 1
S
Figure 3.13 Scene 1: Path generated by the algorithm Bug2.