
Page 155 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 155
130 MOTION PLANNING FOR A MOBILE ROBOT
T T
S S
r u
r u
(a) (b)
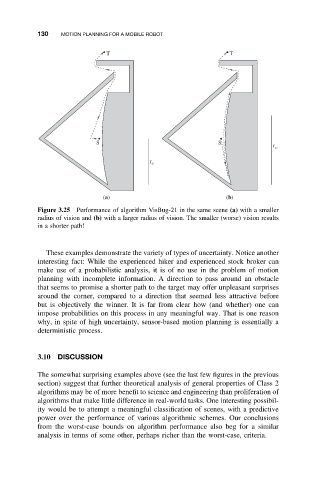
Figure 3.25 Performance of algorithm VisBug-21 in the same scene (a) with a smaller
radius of vision and (b) with a larger radius of vision. The smaller (worse) vision results
in a shorter path!
These examples demonstrate the variety of types of uncertainty. Notice another
interesting fact: While the experienced hiker and experienced stock broker can
make use of a probabilistic analysis, it is of no use in the problem of motion
planning with incomplete information. A direction to pass around an obstacle
that seems to promise a shorter path to the target may offer unpleasant surprises
around the corner, compared to a direction that seemed less attractive before
but is objectively the winner. It is far from clear how (and whether) one can
impose probabilities on this process in any meaningful way. That is one reason
why, in spite of high uncertainty, sensor-based motion planning is essentially a
deterministic process.
3.10 DISCUSSION
The somewhat surprising examples above (see the last few figures in the previous
section) suggest that further theoretical analysis of general properties of Class 2
algorithms may be of more benefit to science and engineering than proliferation of
algorithms that make little difference in real-world tasks. One interesting possibil-
ity would be to attempt a meaningful classification of scenes, with a predictive
power over the performance of various algorithmic schemes. Our conclusions
from the worst-case bounds on algorithm performance also beg for a similar
analysis in terms of some other, perhaps richer than the worst-case, criteria.