
Page 273 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 273
248 MOTION PLANNING FOR TWO-DIMENSIONAL ARM MANIPULATORS
q 4 q 5
l 8 q 6 q 7 l 9
q 3 l 2
Robot Base
l 1
Figure 5.32 A 9-DOF robot with two arms attached to a common base.
motion of the robot in WS. By introducing FCS, the robot motion planning
problem can be studied under a unified mathematical framework [108].
For sensor-based motion planning algorithms to work, it is essential that the
CSO boundary presents manifolds. This topological property is not trivial and
cannot be simply assumed. It has been shown in Ref. 109 that in general CSO
boundaries are not manifolds. Consider, for example, the example shown in
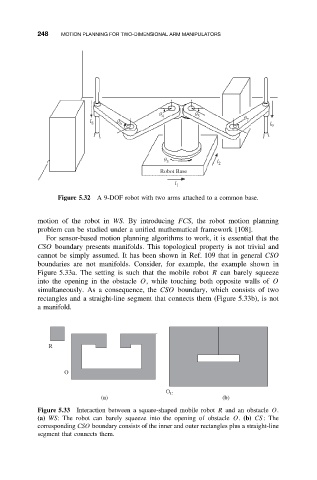
Figure 5.33a. The setting is such that the mobile robot R can barely squeeze
into the opening in the obstacle O, while touching both opposite walls of O
simultaneously. As a consequence, the CSO boundary, which consists of two
rectangles and a straight-line segment that connects them (Figure 5.33b), is not
a manifold.
R
O
O C
(a) (b)
Figure 5.33 Interaction between a square-shaped mobile robot R and an obstacle O.
(a) WS: The robot can barely squeeze into the opening of obstacle O. (b) CS:The
corresponding CSO boundary consists of the inner and outer rectangles plus a straight-line
segment that connects them.