
Page 268 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 268
PRISMATIC–REVOLUTE (PR) ARM 243
B
0 1
T
11 6
B 10
5,6 9
2 C
10 4
11 5
4
3 8
1 2
6 2 3 S 5 C
7,8,9 D 1 10
A 3 4 11
1 7 7 T
D 8
S 9
A
0
q 2 = 0
(a) (b)
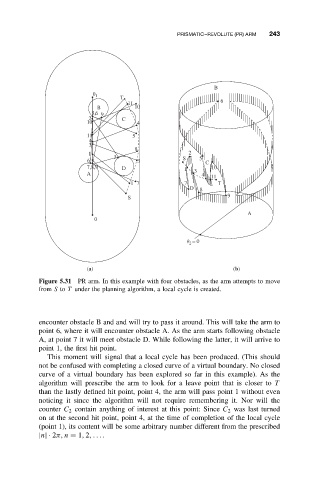
Figure 5.31 PR arm. In this example with four obstacles, as the arm attempts to move
from S to T under the planning algorithm, a local cycle is created.
encounter obstacle B and and will try to pass it around. This will take the arm to
point 6, where it will encounter obstacle A. As the arm starts following obstacle
A, at point 7 it will meet obstacle D. While following the latter, it will arrive to
point 1, the first hit point.
This moment will signal that a local cycle has been produced. (This should
not be confused with completing a closed curve of a virtual boundary. No closed
curve of a virtual boundary has been explored so far in this example). As the
algorithm will prescribe the arm to look for a leave point that is closer to T
than the lastly defined hit point, point 4, the arm will pass point 1 without even
noticing it since the algorithm will not require remembering it. Nor will the
counter C 2 contain anything of interest at this point: Since C 2 was last turned
on at the second hit point, point 4, at the time of completion of the local cycle
(point 1), its content will be some arbitrary number different from the prescribed
|n|· 2π, n = 1, 2,. .. .