
Page 264 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 264
PRISMATIC–REVOLUTE (PR) ARM 239
S
0 1
4, 5
1
S
2 4 5
4
1
5
1 S
2
A 2
6
6
3 A
7
7
T 6 8
7
3,8 T
0
T q = 90°
q = 0 8 3 2
2
(a) (b)
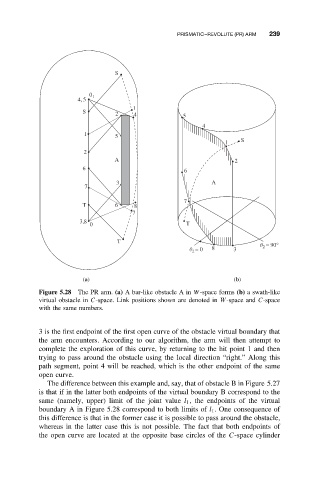
Figure 5.28 The PR arm. (a) A bar-like obstacle A in W-space forms (b) a swath-like
virtual obstacle in C-space. Link positions shown are denoted in W-space and C-space
with the same numbers.
3 is the first endpoint of the first open curve of the obstacle virtual boundary that
the arm encounters. According to our algorithm, the arm will then attempt to
complete the exploration of this curve, by returning to the hit point 1 and then
trying to pass around the obstacle using the local direction “right.” Along this
path segment, point 4 will be reached, which is the other endpoint of the same
open curve.
The difference between this example and, say, that of obstacle B in Figure 5.27
is that if in the latter both endpoints of the virtual boundary B correspond to the
same (namely, upper) limit of the joint value l 1 , the endpoints of the virtual
boundary A in Figure 5.28 correspond to both limits of l 1 . One consequence of
this difference is that in the former case it is possible to pass around the obstacle,
whereas in the latter case this is not possible. The fact that both endpoints of
the open curve are located at the opposite base circles of the C-space cylinder