
Page 260 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 260
PRISMATIC–REVOLUTE (PR) ARM 235
8 S
7
6 1 2
4
A 3
3
2 4
6
7 5
l 2max B
q 1
8
11 q 1 = 0
0
9
l 1
T 10
(a)
l 2
l 2max
10
T
S
2
3
9
5
4
1
B
8
A
6
7
q 1 = 90°
q 1 = 0
+
q 1
(b)
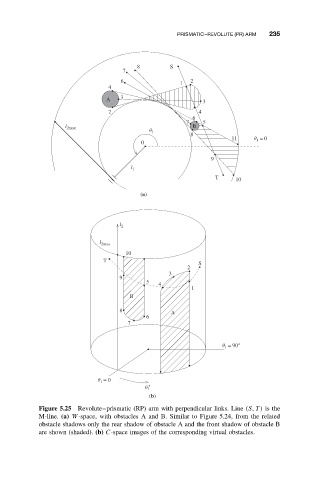
Figure 5.25 Revolute–prismatic (RP) arm with perpendicular links. Line (S, T ) is the
M-line. (a) W-space, with obstacles A and B. Similar to Figure 5.24, from the related
obstacle shadows only the rear shadow of obstacle A and the front shadow of obstacle B
are shown (shaded). (b) C-space images of the corresponding virtual obstacles.