
Page 261 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 261
236 MOTION PLANNING FOR TWO-DIMENSIONAL ARM MANIPULATORS
l 2
O 1
l 1 P
q 2 P
P 1
l 1 l 1 P l 2max
O
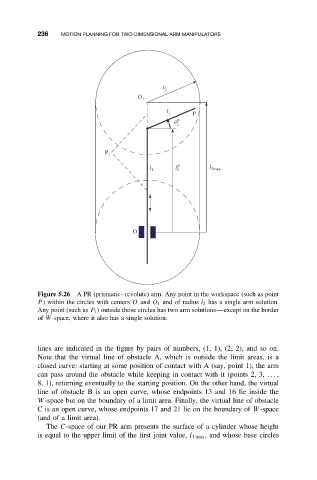
Figure 5.26 A PR (prismatic–revolute) arm. Any point in the workspace (such as point
P) within the circles with centers O and O 1 and of radius l 2 has a single arm solution.
Any point (such as P 1 ) outside those circles has two arm solutions—except on the border
of W-space, where it also has a single solution.
lines are indicated in the figure by pairs of numbers, (1, 1), (2, 2), and so on.
Note that the virtual line of obstacle A, which is outside the limit areas, is a
closed curve: starting at some position of contact with A (say, point 1), the arm
can pass around the obstacle while keeping in contact with it (points 2, 3, ... ,
8, 1), returning eventually to the starting position. On the other hand, the virtual
line of obstacle B is an open curve, whose endpoints 13 and 16 lie inside the
W-space but on the boundary of a limit area. Finally, the virtual line of obstacle
C is an open curve, whose endpoints 17 and 21 lie on the boundary of W-space
(and of a limit area).
The C-space of our PR arm presents the surface of a cylinder whose height
is equal to the upper limit of the first joint value, l 1max , and whose base circles