
Page 262 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 262
PRISMATIC–REVOLUTE (PR) ARM 237
l
T M 1
2
l 1max
M 1 0
11 1
10 13,16
12 12
13 B 5 T M 2
15 14 9 11,15 13
12 16
4 T
2 16 11 B
10,14 15
5 10 5
3 3,6
4 S 14 M
A 1 4
8 1 9
7 2,7 9 6
19 3
6
A
8 7 S
2 q = 0
18,20
S
19
1 8
20
0 18
17,22 1 C
19 21
C 21
20 17
18 q = 180° q = 270°
2
2
17
(a) (b)
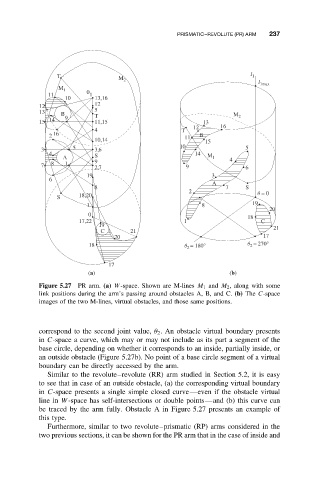
Figure 5.27 PR arm. (a) W-space. Shown are M-lines M 1 and M 2 , along with some
link positions during the arm’s passing around obstacles A, B, and C. (b) The C-space
images of the two M-lines, virtual obstacles, and those same positions.
correspond to the second joint value, θ 2 . An obstacle virtual boundary presents
in C-space a curve, which may or may not include as its part a segment of the
base circle, depending on whether it corresponds to an inside, partially inside, or
an outside obstacle (Figure 5.27b). No point of a base circle segment of a virtual
boundary can be directly accessed by the arm.
Similar to the revolute–revolute (RR) arm studied in Section 5.2, it is easy
to see that in case of an outside obstacle, (a) the corresponding virtual boundary
in C-space presents a single simple closed curve—even if the obstacle virtual
line in W-space has self-intersections or double points—and (b) this curve can
be traced by the arm fully. Obstacle A in Figure 5.27 presents an example of
this type.
Furthermore, similar to two revolute–prismatic (RP) arms considered in the
two previous sections, it can be shown for the PR arm that in the case of inside and