
Page 266 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 266
PRISMATIC–REVOLUTE (PR) ARM 241
4 0 1
5 2
6
5
A
3
1,5,6
2,4 1 1
A
2
6 3
4
3
0
q = 90°
2
q = 0
2
(a) (b)
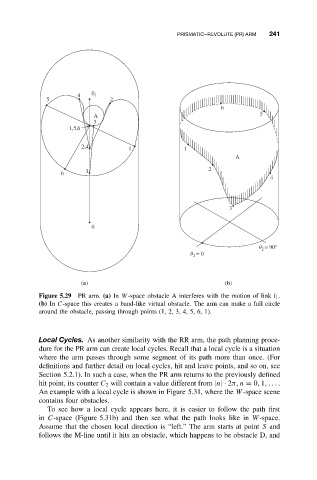
Figure 5.29 PR arm. (a) In W-space obstacle A interferes with the motion of link l 1 .
(b) In C-space this creates a band-like virtual obstacle. The arm can make a full circle
around the obstacle, passing through points (1, 2, 3, 4, 5, 6, 1).
Local Cycles. As another similarity with the RR arm, the path planning proce-
dure for the PR arm can create local cycles. Recall that a local cycle is a situation
where the arm passes through some segment of its path more than once. (For
definitions and further detail on local cycles, hit and leave points, and so on, see
Section 5.2.1). In such a case, when the PR arm returns to the previously defined
hit point, its counter C 2 will contain a value different from |n|· 2π, n = 0, 1,... .
An example with a local cycle is shown in Figure 5.31, where the W-space scene
contains four obstacles.
To see how a local cycle appears here, it is easier to follow the path first
in C-space (Figure 5.31b) and then see what the path looks like in W-space.
Assume that the chosen local direction is “left.” The arm starts at point S and
follows the M-line until it hits an obstacle, which happens to be obstacle D, and