
Page 339 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 339
314 MOTION PLANNING FOR THREE-DIMENSIONAL ARM MANIPULATORS
I
3
I 3max d g
I
3
d
I 3max
g e f
O
e 1
f
v
P 1
I
o
O f v 1 2max
J v c I
1 2 2
o c I v
2 O I 3
I 2max 3 V 1max a
J 2
O 3
3 I J
1max 2
a b I v O
1
3 2
I
1 O
2
(a)
(b)
I
d 3
g
O
1
O
3
e f
o I
c 2
O
2
a b
I
1
(c)
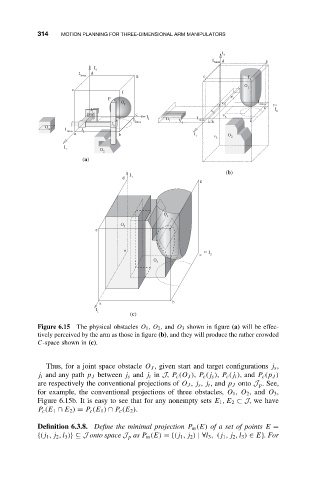
Figure 6.15 The physical obstacles O 1 , O 2 ,and O 3 shown in figure (a) will be effec-
tively perceived by the arm as those in figure (b), and they will produce the rather crowded
C-space shown in (c).
Thus, for a joint space obstacle O J , given start and target configurations j s ,
j t and any path p J between j s and j t in J, P c (O J ), P c (j s ), P c (j t ),and P c (p J )
are respectively the conventional projections of O J , j s , j t ,and p J onto J p . See,
for example, the conventional projections of three obstacles, O 1 , O 2 ,and O 3 ,
Figure 6.15b. It is easy to see that for any nonempty sets E 1 ,E 2 ⊂ J,wehave
P c (E 1 ∩ E 2 ) = P c (E 1 ) ∩ P c (E 2 ).
Definition 6.3.8. Define the minimal projection P m (E) of a set of points E =
{(j 1 ,j 2 ,l 3 )}⊆ J onto space J p as P m (E) ={(j 1 ,j 2 ) |∀l 3 ,(j 1 ,j 2 ,l 3 ) ∈ E}.For