
Page 336 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 336
THREE-LINK XXP ARM MANIPULATORS 311
S
q 2
l 2
J 1
l 1
O 1
q 1
J o
O
T
(a)
q 2
−2p 0 2p
t −1,1 t 0,1
t 1,1
s −1,1 s 0,1 s 1,1
2 p
t −1,0 t 0,0 t 1,0
s −1,0
s 0,0 s 1,0
0
t −1,−1 t 0,−1 t 1,−1
s −1,−1
q
1
s 0,−1 s 1,−1
(b)
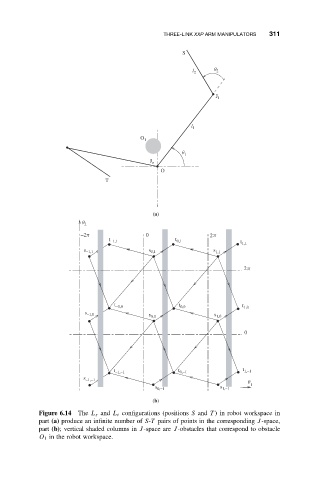
Figure 6.14 The L s and L t configurations (positions S and T ) in robot workspace in
part (a) produce an infinite number of S-T pairs of points in the corresponding J-space,
part (b); vertical shaded columns in J-space are J-obstacles that correspond to obstacle
O 1 in the robot workspace.