
Page 369 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 369
344 HUMAN PERFORMANCE IN MOTION PLANNING
performed better when operating “in the dark.” One subject did quite well “in the
dark,” then was not even able to finish the task when operating with a completely
visible scene, and refused to accept that in both cases he had dealt with the same
scene: “This one [with complete information] is much harder; I think it has no
solution.” It seems that extra information doesn’t help. What’s going on?
Human Versus Computer Performance with the Arm. As we did above
with the labyrinth, we can attempt a comparison between the human and computer
performance when moving the arm manipulator, under the same conditions. Since
in previous examples human performance was similar in tests with complete
and incomplete information, it is not important which to consider: For example,
the performance shown in Figure 7.6 is representative enough for our informal
comparison. On the algorithm side, however, the input information factor makes a
tremendous difference—as it should. The comparison becomes interesting when
the computer algorithm operates with incomplete (“sensing”) information.
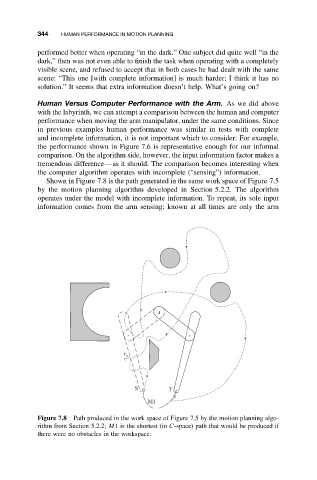
Shown in Figure 7.8 is the path generated in the same work space of Figure 7.5
by the motion planning algorithm developed in Section 5.2.2. The algorithm
operates under the model with incomplete information. To repeat, its sole input
information comes from the arm sensing; known at all times are only the arm
r u
S T
M1
Figure 7.8 Path produced in the work space of Figure 7.5 by the motion planning algo-
rithm from Section 5.2.2; M1 is the shortest (in C-space) path that would be produced if
there were no obstacles in the workspace.