
Page 364 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 364
PRELIMINARY OBSERVATIONS 339
discussing the corresponding tests, so let us repeat the conclusion from the above
discussion:
When operating in a labyrinth, humans have no difficulty learning and using
motion planning algorithms with incomplete information.
7.2.2 Moving an Arm Manipulator
Operating with Complete Information. We are now approaching the main
point of this discussion. There was nothing surprising about the human perfor-
mance in a labyrinth; by and large, the examples of maze exploration above
agree with our intuition. We expected that humans would be good at moving in a
labyrinth when seeing all of it (moving with complete information), not so good
when moving in a labyrinth “in the dark” (moving with incomplete information),
and quite good at mastering a motion planning algorithm, and this is what hap-
pened. We can use these examples as a kind of a benchmark for assessing human
performance in motion planning.
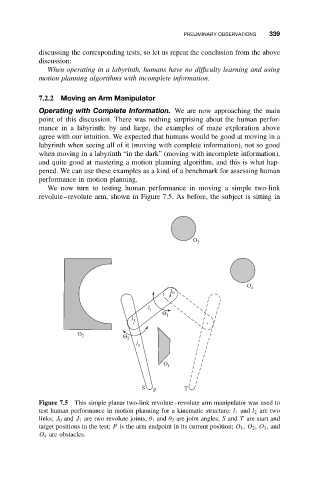
We now turn to testing human performance in moving a simple two-link
revolute–revolute arm, shown in Figure 7.5. As before, the subject is sitting in
O 3
O 4
J 0
l 1
Θ 1
J 1
O 2 Θ 2
l 2
O 1
S P T
Figure 7.5 This simple planar two-link revolute–revolute arm manipulator was used to
test human performance in motion planning for a kinematic structure: l 1 and l 2 are two
links; J 0 and J 1 are two revolute joints; θ 1 and θ 2 are joint angles; S and T are start and
target positions in the test; P is the arm endpoint in its current position; O 1 , O 2 , O 3 ,and
O 4 are obstacles.