
Page 416 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 416
INTRODUCTION 391
Target
coordinates
Robot position (coordinates)
Path Step
Planner Planner Joint increments Robot
(global (local commands Arm &
planning) planning) Controller
Sensor
Data Sensor Sensitive
Processor Interface Skin
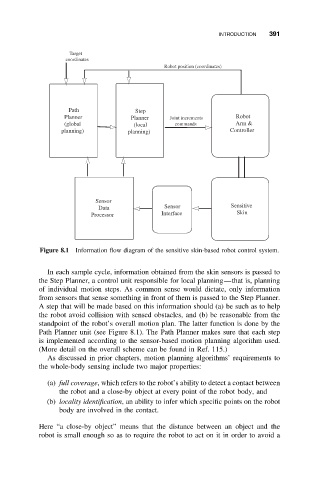
Figure 8.1 Information flow diagram of the sensitive skin-based robot control system.
In each sample cycle, information obtained from the skin sensors is passed to
the Step Planner, a control unit responsible for local planning—that is, planning
of individual motion steps. As common sense would dictate, only information
from sensors that sense something in front of them is passed to the Step Planner.
A step that will be made based on this information should (a) be such as to help
the robot avoid collision with sensed obstacles, and (b) be reasonable from the
standpoint of the robot’s overall motion plan. The latter function is done by the
Path Planner unit (see Figure 8.1). The Path Planner makes sure that each step
is implemented according to the sensor-based motion planning algorithm used.
(More detail on the overall scheme can be found in Ref. 115.)
As discussed in prior chapters, motion planning algorithms’ requirements to
the whole-body sensing include two major properties:
(a) full coverage, which refers to the robot’s ability to detect a contact between
the robot and a close-by object at every point of the robot body, and
(b) locality identification, an ability to infer which specific points on the robot
body are involved in the contact.
Here “a close-by object” means that the distance between an object and the
robot is small enough so as to require the robot to act on it in order to avoid a