
Page 419 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 419
394 SENSITIVE SKIN—DESIGNING AN ALL-SENSITIVE ROBOT ARM MANIPULATOR
Object
sensitivity distance
lens
LED
sensitivity diameter
(a)
Sensitivity area
Ob2
Ob1
Sensor
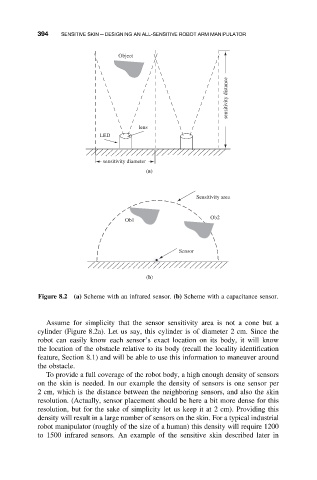
Figure 8.2 (a) Scheme with an infrared sensor. (b) Scheme with a capacitance sensor.
Assume for simplicity that the sensor sensitivity area is not a cone but a
cylinder (Figure 8.2a). Let us say, this cylinder is of diameter 2 cm. Since the
robot can easily know each sensor’s exact location on its body, it will know
the location of the obstacle relative to its body (recall the locality identification
feature, Section 8.1) and will be able to use this information to maneuver around
the obstacle.
To provide a full coverage of the robot body, a high enough density of sensors
on the skin is needed. In our example the density of sensors is one sensor per
2 cm, which is the distance between the neighboring sensors, and also the skin
resolution. (Actually, sensor placement should be here a bit more dense for this
resolution, but for the sake of simplicity let us keep it at 2 cm). Providing this
density will result in a large number of sensors on the skin. For a typical industrial
robot manipulator (roughly of the size of a human) this density will require 1200
to 1500 infrared sensors. An example of the sensitive skin described later in