
Page 95 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 95
70 A QUICK SKETCH OF MAJOR ISSUES IN ROBOTICS
T
2
1
T
S
S
(a) (b)
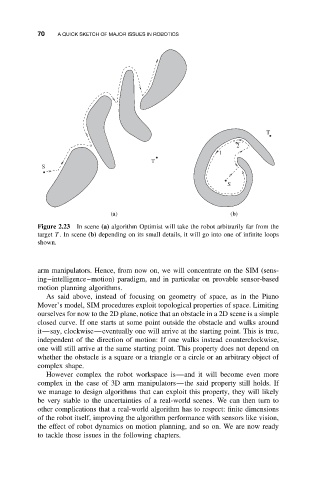
Figure 2.23 In scene (a) algorithm Optimist will take the robot arbitrarily far from the
target T . In scene (b) depending on its small details, it will go into one of infinite loops
shown.
arm manipulators. Hence, from now on, we will concentrate on the SIM (sens-
ing–intelligence–motion) paradigm, and in particular on provable sensor-based
motion planning algorithms.
As said above, instead of focusing on geometry of space, as in the Piano
Mover’s model, SIM procedures exploit topological properties of space. Limiting
ourselves for now to the 2D plane, notice that an obstacle in a 2D scene is a simple
closed curve. If one starts at some point outside the obstacle and walks around
it—say, clockwise—eventually one will arrive at the starting point. This is true,
independent of the direction of motion: If one walks instead counterclockwise,
one will still arrive at the same starting point. This property does not depend on
whether the obstacle is a square or a triangle or a circle or an arbitrary object of
complex shape.
However complex the robot workspace is—and it will become even more
complex in the case of 3D arm manipulators—the said property still holds. If
we manage to design algorithms that can exploit this property, they will likely
be very stable to the uncertainties of a real-world scenes. We can then turn to
other complications that a real-world algorithm has to respect: finite dimensions
of the robot itself, improving the algorithm performance with sensors like vision,
the effect of robot dynamics on motion planning, and so on. We are now ready
to tackle those issues in the following chapters.