
Page 93 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 93
68 A QUICK SKETCH OF MAJOR ISSUES IN ROBOTICS
8
planning within the same framework. Other approaches assume that, similar to
human and animals’ motion planning, the robot’s location in space should come
from sensors or from some separate sensor processing software, and so they
concentrate on motion planning and collision-avoidance strategies.
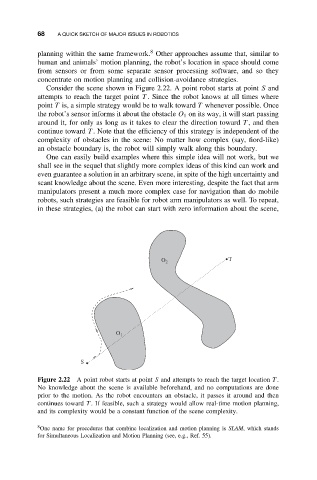
Consider the scene shown in Figure 2.22. A point robot starts at point S and
attempts to reach the target point T . Since the robot knows at all times where
point T is, a simple strategy would be to walk toward T whenever possible. Once
the robot’s sensor informs it about the obstacle O 1 on its way, it will start passing
around it, for only as long as it takes to clear the direction toward T ,and then
continue toward T . Note that the efficiency of this strategy is independent of the
complexity of obstacles in the scene: No matter how complex (say, fiord-like)
an obstacle boundary is, the robot will simply walk along this boundary.
One can easily build examples where this simple idea will not work, but we
shall see in the sequel that slightly more complex ideas of this kind can work and
even guarantee a solution in an arbitrary scene, in spite of the high uncertainty and
scant knowledge about the scene. Even more interesting, despite the fact that arm
manipulators present a much more complex case for navigation than do mobile
robots, such strategies are feasible for robot arm manipulators as well. To repeat,
in these strategies, (a) the robot can start with zero information about the scene,
O 2 T
O 1
S
Figure 2.22 A point robot starts at point S and attempts to reach the target location T .
No knowledge about the scene is available beforehand, and no computations are done
prior to the motion. As the robot encounters an obstacle, it passes it around and then
continues toward T . If feasible, such a strategy would allow real-time motion planning,
and its complexity would be a constant function of the scene complexity.
8 One name for procedures that combine localization and motion planning is SLAM, which stands
for Simultaneous Localization and Motion Planning (see, e.g., Ref. 55).