
Page 429 - Sensors and Control Systems in Manufacturing
P. 429
Sensors in Flexible Manufacturing Systems
consideration is selecting the optimum resolution for the task to be 383
executed. There is a tendency to assume that the higher the resolu-
tion, the greater the application range for the system. However, con-
siderable success has been achieved with a resolution as low as 50 ×
50 picture elements. With serial processing architectures, this resolu-
tion will generate sufficient gray-scale data to test the ingenuity of
image processing algorithms. Should its processing time fall below
0.5 s, an algorithm can be used for robots associated with handling.
However, in welding applications, the image processing time must
be faster.
8.3 Robot Control through Vision Sensors
An increasing number of manufacturing processes rely on machine-
vision sensors for automation. The tasks for which vision sensors are
used vary widely in scope and difficulty. Robotic applications in
which vision sensing has been used successfully include inspection,
alignment, object identification, and character recognition.
Human vision involves transformation, analysis, and interpreta-
tion of images. Machine-vision sensing can be explained in terms of
the same functions: image transformation, image analysis, and image
interpretation.
8.3.1 Image Transformation
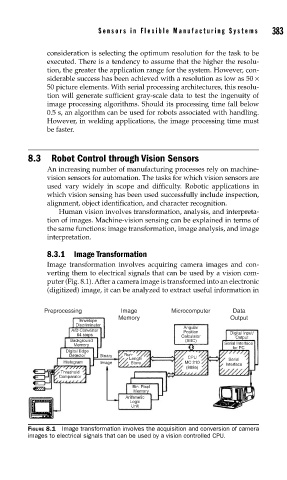
Image transformation involves acquiring camera images and con-
verting them to electrical signals that can be used by a vision com-
puter (Fig. 8.1). After a camera image is transformed into an electronic
(digitized) image, it can be analyzed to extract useful information in
Preprocessing Image Microcomputer Data
Memory Output
Envelope
Discriminator Angular
A/D Converter Position
64 steps Calculator Digital Input/
Background (SBC) Output
Memory Serial Interface
for PC
Digital Edge
Detector Binary Run-
Length CPU Serial
Histogram Image Store MC 210 Interface
(8085)
Threshold
Comparator
Bin. Pixel
Memory
Arithmetic
Logic
Unit
FIGURE 8.1 Image transformation involves the acquisition and conversion of camera
images to electrical signals that can be used by a vision controlled CPU.