
Page 437 - Sensors and Control Systems in Manufacturing
P. 437
Sensors in Flexible Manufacturing Systems
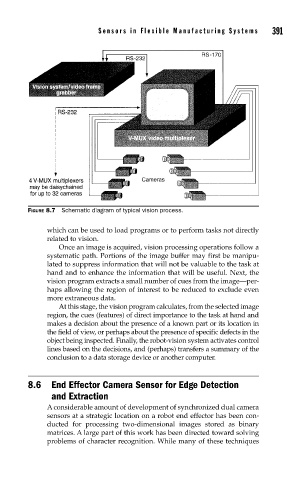
FIGURE 8.7 Schematic diagram of typical vision process. 391
which can be used to load programs or to perform tasks not directly
related to vision.
Once an image is acquired, vision processing operations follow a
systematic path. Portions of the image buffer may first be manipu-
lated to suppress information that will not be valuable to the task at
hand and to enhance the information that will be useful. Next, the
vision program extracts a small number of cues from the image—per-
haps allowing the region of interest to be reduced to exclude even
more extraneous data.
At this stage, the vision program calculates, from the selected image
region, the cues (features) of direct importance to the task at hand and
makes a decision about the presence of a known part or its location in
the field of view, or perhaps about the presence of specific defects in the
object being inspected. Finally, the robot-vision system activates control
lines based on the decisions, and (perhaps) transfers a summary of the
conclusion to a data storage device or another computer.
8.6 End Effector Camera Sensor for Edge Detection
and Extraction
A considerable amount of development of synchronized dual camera
sensors at a strategic location on a robot end effector has been con-
ducted for processing two-dimensional images stored as binary
matrices. A large part of this work has been directed toward solving
problems of character recognition. While many of these techniques