
Page 98 - Sensors and Control Systems in Manufacturing
P. 98
Classification and Types of Sensors
Detector 59
Effective Beam
Field of View Field of View
Source
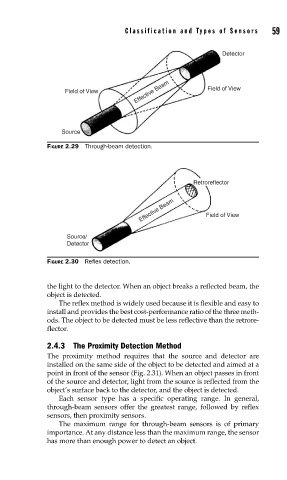
FIGURE 2.29 Through-beam detection.
Retroreflector
Effective Beam Field of View
Source/
Detector
FIGURE 2.30 Refl ex detection.
the light to the detector. When an object breaks a reflected beam, the
object is detected.
The reflex method is widely used because it is flexible and easy to
install and provides the best cost-performance ratio of the three meth-
ods. The object to be detected must be less reflective than the retrore-
flector.
2.4.3 The Proximity Detection Method
The proximity method requires that the source and detector are
installed on the same side of the object to be detected and aimed at a
point in front of the sensor (Fig. 2.31). When an object passes in front
of the source and detector, light from the source is reflected from the
object’s surface back to the detector, and the object is detected.
Each sensor type has a specific operating range. In general,
through-beam sensors offer the greatest range, followed by reflex
sensors, then proximity sensors.
The maximum range for through-beam sensors is of primary
importance. At any distance less than the maximum range, the sensor
has more than enough power to detect an object.