
Page 208 - The Tribology Handbook
P. 208
B9 Screws
Screws are used as linear actuators or jacks and can generate substantial axial forces. They can operate with an external
drive to either the screw or the nut, and the driving system often incorporates a worm gear in order to obtain a high
reduction ratio.
TYPES OF SCREW
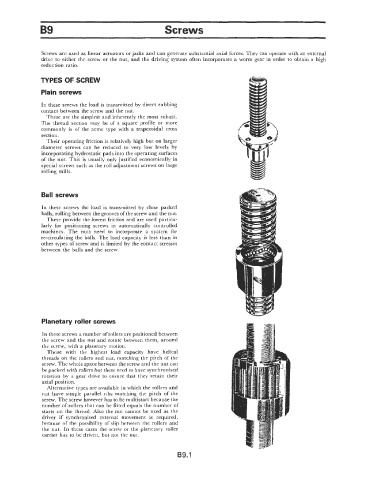
Plain screws
In these screws the load is transmitted by direct rubbing
contact between the screw and the nut.
These are the simplest and inherently the most robust.
The thread section may be of a square profile or more
commonly is of the acme type with a trapezoidal cross
section.
Their operating friction is relatively high but on larger
diameter screws can be reduced to very low levels by
incorporating hydrostatic pads into the operating surfaces
of the nut. This is usually only justified economically in
special screws such as the roll adjustment screws on large
rolling mills.
Ball screws
In these screws the load is transmitted by close packed
balls, rolling between the grooves of the screw and the nut.
These provide the lowest friction and are used particu-
larly for positioning screws in automatically controlled
machines. The nuts need to incorporate a system for
re-circulating the balls. The load capacity is less than in
other types of screw and is limited by the contact stresses
between the balls and the screw.
Planetary roller screws
In these screws a number of rollers are positioned between
the screw and the nut and rotate between them, around
the screw, with a planetary motion.
Those with the highest load capacity have helical
threads on the rollers and nut, matching the pitch of the
screw. The whole space between the screw and the nut can
be packed with rollers but these need to have synchronised
rotation by a gear drive to ensure that they retain their
axial position.
Alternative types are available in which the rollers and
nut have simple parallel ribs matching the pitch of the
screw. The screw however has to be multistart because the
number of rollers that can be fitted equals the number of
starts on the thread. Also the nut cannot be used as the
driver if synchronised external movement is required,
because of the possibility of slip between the rollers and
the nut. In these cases the screw or the planetary roller
carrier has to be driven. but not the nut.
B9.1