
Page 118 - The Unofficial Guide to Lego Mindstorms Robots
P. 118
107
Some of the challenges Minerva faces are discussed later in this chapter. First, I'm going to talk about Minerva's amazing
mechanical features.
Directional Transmission
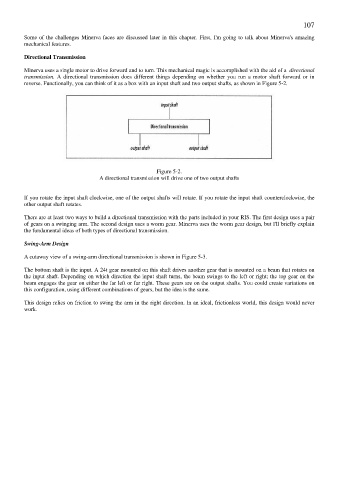
Minerva uses a single motor to drive forward and to turn. This mechanical magic is accomplished with the aid of a directional
transmission. A directional transmission does different things depending on whether you run a motor shaft forward or in
reverse. Functionally, you can think of it as a box with an input shaft and two output shafts, as shown in Figure 5-2.
Figure 5-2.
A directional transmission will drive one of two output shafts
If you rotate the input shaft clockwise, one of the output shafts will rotate. If you rotate the input shaft counterclockwise, the
o ther output shaft rotates.
T here are at le ast two ways to build a directional transmission with the parts included in your RIS. The first design uses a pair
of gears on a swinging arm. The second design uses a worm gear. Minerva uses the worm gear design, but I'll briefly explain
the fundamental ideas of both types of directional transmission.
Swing-Arm Design
A cutaway view of a swing-arm directional transmission is shown in Figure 5-3.
The bottom shaft is the input. A 24t gear mounted on this shaft drives another gear that is mounted on a beam that rotates on
th e input shaft. Depe nding on which direction the input shaft turns, the beam swings to the left or right; the top gear on the
beam engages the gear on either the far left or far right. These gears are on the output shafts. You could create variations on
this configuration, using different combinations of gears, but the idea is the same.
This design relies on friction to swing the arm in the right direction. In an ideal , frictionless world, this design would never
work.