
Page 122 - The Unofficial Guide to Lego Mindstorms Robots
P. 122
111
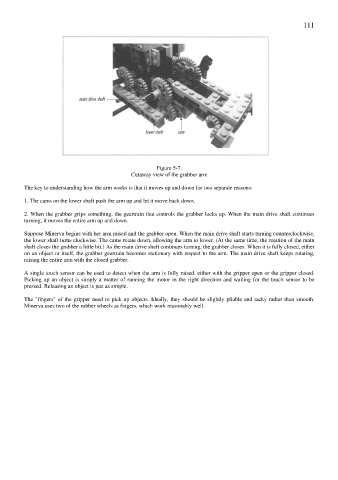
Figure 5-7.
Cutaway view of the grabber arm
T he key to understanding how the arm works is that it moves up and down for two separate reasons:
1. The cams on the lower shaft push the arm up and let it move back down.
2 . When the grabber grips something, the geartrain that controls the grabber locks up. When the main drive shaft continues
turning, it m oves the entire arm up and down.
Suppose Minerva begins with her arm raised and the grabber open. When the main drive shaft starts turning counterclockwise,
the lower shaft turns clockwise. The cams rotate down, allowing the arm to lower. (At the same time, the rotation of the main
shaft closes the grabber a little bit.) As the main drive shaft continues turning, the grabber closes. When it is fully closed, either
on an object or itself, the grabber gea rtrain becomes stationary with respect to the arm. The main drive shaft keeps rotating,
raising the entire arm with the closed grabber.
A single touch sensor can be used to detect when the arm is fully raised, either with the gripper open or the gripper closed.
Picking up an object is simply a matter of running the motor in the right direction and waiting for the touch sensor to be
pressed. Releasing an object is just as simple.
The "fingers" of the gripper need to pick up objects. Ideally, they should be slightly pliable and tacky rather than smooth.
Minerva uses two of the rubber wheels as fingers, which work reasonably well.