
Page 231 - Thomson, William Tyrrell-Theory of Vibration with Applications-Taylor _ Francis (2010)
P. 231
218 Lagrange’s Equation Chap. 7
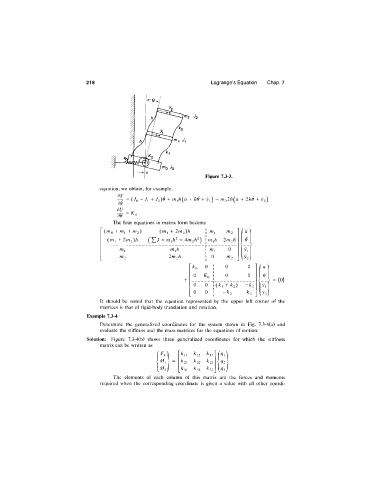
Figure 7.3-3.
equation, we obtain, for example.
= (7 () + + J2)6 -I- m^h(^u hS + + ni22h(^u + 2hd + 3) 2 )
86
dU
86 = A:n
The four equations in matrix form become
(mQ + mj -t- m2) (m j + 2m2)h ! ">1 m2 ' u
1
(m, + 2m2)h { L J + rn^h^ + 4^ 2/?^]1 1 m^h 2^ 2/1 6
T 1 >
mj m^h 1 ATIj 0 y,
m2 2^ 2/1 1 0 m2 1
1
0 1 0 0 'u '
0 ^0 0 0 e
= {0}
0 0 l(^ , 1 + ^2) -k ^2 y>
0 0 1 -k i ^2
1
It should be noted that the equation represented by the upper left corner of the
matrices is that of rigid-body translation and rotation.
Example 7.3-4
Determine the generalized coordinates for the system shown in Fig. 7.3-4(a) and
evaluate the stiffness and the mass matrices for the equations of motion.
Solution: Figure 7.3-4(b) shows three generalized coordinates for which the stiffness
matrix can be written as
^11 k ]2 ^13 [<7,
M, = ^21 ki2 ^23
M,j ^31 ^32 ^33 U 3
The elements of each column of this matrix are the forces and moments
required when the corresponding coordinate is given a value with all other coordi-