
Page 417 - Thomson, William Tyrrell-Theory of Vibration with Applications-Taylor _ Francis (2010)
P. 417
404 Classical Methods Chap. 12
The rule for geared systems is thus quite simple: Multiply all stiffness and
inertias of the geared shaft by n^, where n is the speed ratio of the geared shaft to
the reference shaft.
12.11 BRANCHED SYSTEMS
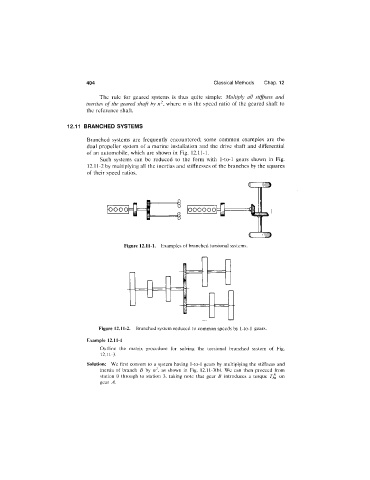
Branched systems are frequently encountered; some common examples are the
dual propeller system of a marine installation and the drive shaft and differential
of an automobile, which are shown in Fig. 12.11-1.
Such systems can be reduced to the form with 1-to-l gears shown in Fig.
12.11-2 by multiplying all the inertias and stiffnesses of the branches by the squares
of their speed ratios.
Figure 12.11-1. Examples of branched torsional systems.
Figure 12.11-2. Branched system reduced to common speeds by 1-to-l gears.
Example 12.11-1
Outline the matrix procedure for solving the torsional branched system of Fig.
12.11-3.
Solution: We first convert to a system having 1-to-l gears by multiplying the stiffness and
inertia of branch B by as shown in Fig. 12.11-3(b). We can then proceed from
station 0 through to station 3, taking note that gear B introduces a torque on
gear A.