
Page 284 - Tribology in Machine Design
P. 284
Rolling-contact bearings 269
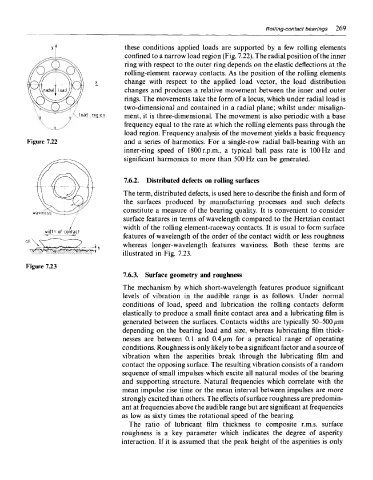
these conditions applied loads are supported by a few rolling elements
confined to a narrow load region (Fig. 7.22). The radial position of the inner
ring with respect to the outer ring depends on the elastic deflections at the
rolling-element raceway contacts. As the position of the rolling elements
change with respect to the applied load vector, the load distribution
changes and produces a relative movement between the inner and outer
rings. The movements take the form of a locus, which under radial load is
two-dimensional and contained in a radial plane; whilst under misalign-
ment, it is three-dimensional. The movement is also periodic with a base
frequency equal to the rate at which the rolling elements pass through the
load region. Frequency analysis of the movement yields a basic frequency
Figure 7.22 and a series of harmonics. For a single-row radial ball-bearing with an
inner-ring speed of ISOOr.p.m., a typical ball pass rate is 100 Hz and
significant harmonics to more than 500 Hz can be generated.
7.6.2. Distributed defects on rolling surfaces
The term, distributed defects, is used here to describe the finish and form of
the surfaces produced by manufacturing processes and such defects
constitute a measure of the bearing quality. It is convenient to consider
surface features in terms of wavelength compared to the Hertzian contact
width of the rolling element-raceway contacts. It is usual to form surface
features of wavelength of the order of the contact width or less roughness
whereas longer-wavelength features waviness. Both these terms are
illustrated in Fig. 7.23.
Figure 7.23
7.6.3. Surface geometry and roughness
The mechanism by which short-wavelength features produce significant
levels of vibration in the audible range is as follows. Under normal
conditions of load, speed and lubrication the rolling contacts deform
elastically to produce a small finite contact area and a lubricating film is
generated between the surfaces. Contacts widths are typically 50-500 jum
depending on the bearing load and size, whereas lubricating film thick-
nesses are between 0.1 and 0.4 nm for a practical range of operating
conditions. Roughness is only likely to be a significant factor and a source of
vibration when the asperities break through the lubricating film and
contact the opposing surface. The resulting vibration consists of a random
sequence of small impulses which excite all natural modes of the bearing
and supporting structure. Natural frequencies which correlate with the
mean impulse rise time or the mean interval between impulses are more
strongly excited than others. The effects of surface roughness are predomin-
ant at frequencies above the audible range but are significant at frequencies
as low as sixty times the rotational speed of the bearing.
The ratio of lubricant film thickness to composite r.m.s. surface
roughness is a key parameter which indicates the degree of asperity
interaction. If it is assumed that the peak height of the asperities is only