
Page 417 - Understanding Automotive Electronics
P. 417
2735 | CH 11 Page 404 Tuesday, March 10, 1998 1:30 PM
11 FUTURE AUTOMOTIVE ELECTRONIC SYSTEMS
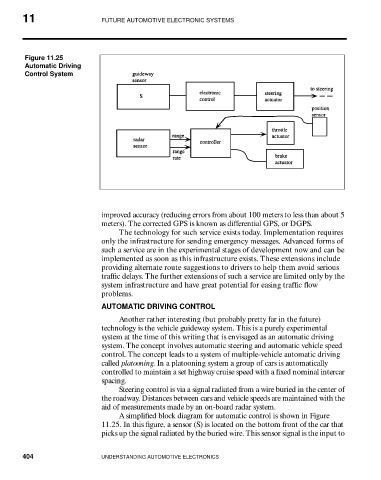
Figure 11.25
Automatic Driving
Control System
improved accuracy (reducing errors from about 100 meters to less than about 5
meters). The corrected GPS is known as differential GPS, or DGPS.
The technology for such service exists today. Implementation requires
only the infrastructure for sending emergency messages. Advanced forms of
such a service are in the experimental stages of development now and can be
implemented as soon as this infrastructure exists. These extensions include
providing alternate route suggestions to drivers to help them avoid serious
traffic delays. The further extensions of such a service are limited only by the
system infrastructure and have great potential for easing traffic flow
problems.
AUTOMATIC DRIVING CONTROL
Another rather interesting (but probably pretty far in the future)
technology is the vehicle guideway system. This is a purely experimental
system at the time of this writing that is envisaged as an automatic driving
system. The concept involves automatic steering and automatic vehicle speed
control. The concept leads to a system of multiple-vehicle automatic driving
called platooning. In a platooning system a group of cars is automatically
controlled to maintain a set highway cruise speed with a fixed nominal intercar
spacing.
Steering control is via a signal radiated from a wire buried in the center of
the roadway. Distances between cars and vehicle speeds are maintained with the
aid of measurements made by an on-board radar system.
A simplified block diagram for automatic control is shown in Figure
11.25. In this figure, a sensor (S) is located on the bottom front of the car that
picks up the signal radiated by the buried wire. This sensor signal is the input to
404 UNDERSTANDING AUTOMOTIVE ELECTRONICS