
Page 153 - Video Coding for Mobile Communications Efficiency, Complexity, and Resilience
P. 153
130 Chapter 5. Warping-Based Motion Estimation Techniques
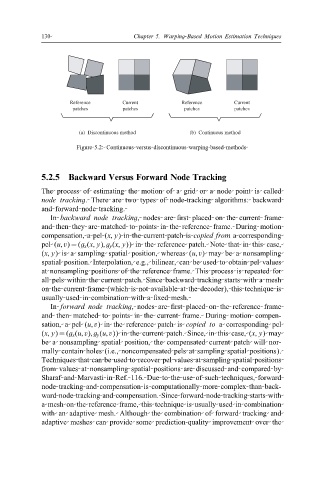
Reference Current Reference Current
patches patches patches patches
(a) Discontinuous method (b) Continuous method
Figure 5.2: Continuous versus discontinuous warping-based methods
5.2.5 Backward Versus Forward Node Tracking
The process of estimating the motion of a grid or a node point is called
node tracking. There are two types of node-tracking algorithms: backward
and forward node tracking.
In backward node tracking, nodes are (rst placed on the current frame
and then they are matched to points in the reference frame. During motion
compensation, a pel (x; y) in the current patch is copied from a corresponding
pel (u; v)=(g x (x; y);g y (x; y)) in the reference patch. Note that in this case,
(x; y) is a sampling spatial position, whereas (u; v) may be a nonsampling
spatial position. Interpolation, e.g., bilinear, can be used to obtain pel values
at nonsampling positions of the reference frame. This process is repeated for
all pels within the current patch. Since backward tracking starts with a mesh
on the current frame (which is not available at the decoder), this technique is
usually used in combination with a (xed mesh.
In forward node tracking, nodes are (rst placed on the reference frame
and then matched to points in the current frame. During motion compen-
sation, a pel (u; v) in the reference patch is copied to a corresponding pel
(x; y)=(g x (u; v);g y (u; v)) in the current patch. Since, in this case, (x; y) may
be a nonsampling spatial position, the compensated current patch will nor-
mally contain holes (i.e., noncompensated pels at sampling spatial positions).
Techniques that can be used to recover pel values at sampling spatial positions
from values at nonsampling spatial positions are discussed and compared by
Sharaf and Marvasti in Ref. 116. Due to the use of such techniques, forward
node tracking and compensation is computationally more complex than back-
ward node tracking and compensation. Since forward node tracking starts with
a mesh on the reference frame, this technique is usually used in combination
with an adaptive mesh. Although the combination of forward tracking and
adaptive meshes can provide some prediction-quality improvement over the