
Page 138 - Welding Robots Technology, System Issues, and Applications
P. 138
Robotic Welding: System Issues 125
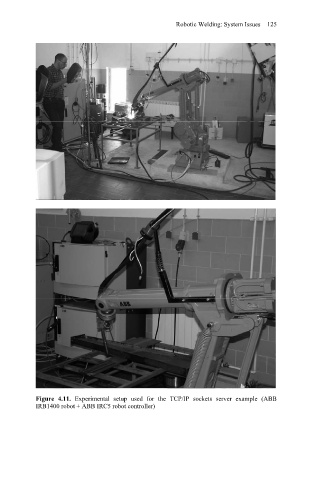
Figure 4.11. Experimental setup used for the TCP/IP sockets server example (ABB
IRB1400 robot + ABB IRC5 robot controller)