
Page 55 -
P. 55
Chapter 2 ■ Edge-Detection Techniques 29
In both cases, the noise mean was very close to zero (although we have
assumed this), and the standard deviation was very close to 20, which was the
value usedtocreatethe noisyimage.
The second major type of noise is called signal-dependent noise.Inthiscase,
the level of the noise value at each point in the image is a function of the grey
level there. The grain seen in some photographs is an example of this sort of
noise, and it is generally harder to deal with. Fortunately, it is less often of
importance, and becomes manageable if the photograph is sampled properly.
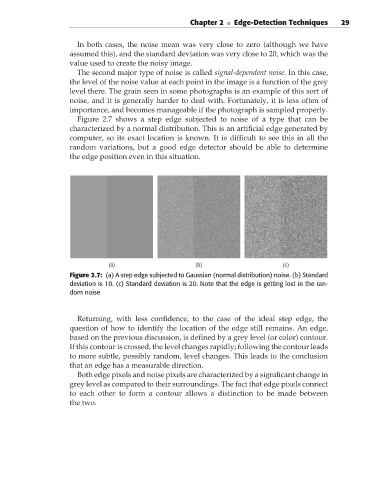
Figure 2.7 shows a step edge subjected to noise of a type that can be
characterized by a normal distribution. This is an artificial edge generated by
computer, so its exact location is known. It is difficult to see this in all the
random variations, but a good edge detector should be able to determine
the edge position even in this situation.
(a) (b) (c)
Figure 2.7: (a) A step edge subjected to Gaussian (normal distribution) noise. (b) Standard
deviation is 10. (c) Standard deviation is 20. Note that the edge is getting lost in the ran-
dom noise
Returning, with less confidence, to the case of the ideal step edge, the
question of how to identify the location of the edge still remains. An edge,
based on the previous discussion, is defined by a grey level (or color) contour.
If this contour is crossed, the level changes rapidly; following the contour leads
to more subtle, possibly random, level changes. This leads to the conclusion
that an edge has a measurable direction.
Both edge pixels and noise pixels are characterized by a significant change in
grey level as compared to their surroundings. The fact that edge pixels connect
to each other to form a contour allows a distinction to be made between
the two.