
Page 165 - Amphibionics : Build Your Own Biologically Inspired Robot
P. 165
Amphibionics 05 3/24/03 8:44 AM Page 144
Amphibionics
Serpentronic’s Main Controller Board
This section focuses on the construction of the robot’s main con-
troller circuit and the fabrication of the printed circuit board (PCB).
Table 5.2 lists all of the parts necessary to build the controller
board. All of the robot’s functions are controlled by a Microchip
PIC 16F84 microcontroller. The microcontroller is an entire com-
puter on a chip and makes it possible to eliminate a large amount
of hardware that would otherwise be required. The microcontroller
serves as the robot’s “brain,” controlling and managing all func-
tions, sensors, and reflexes. The 16F84 microcontroller that we are
using will be clocked at 4 MHz and operates on a 5-volt DC sup-
ply, produced from a 78L05 voltage regulator, with the source
being a 9-volt battery. Each of the six servos used to move the
body sections are powered by a separate 6-volt DC power source.
The 6-volt power source is made up of the individual 3-volt bat-
tery packs in each of the body sections. As you can see from the
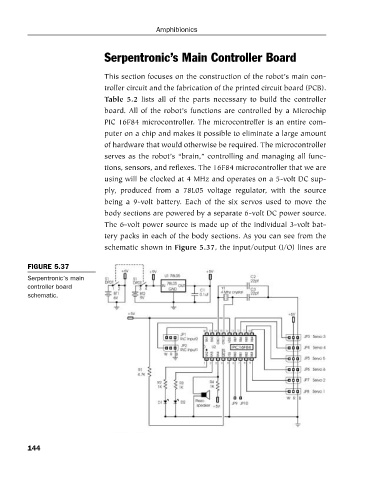
schematic shown in Figure 5.37, the input/output (I/O) lines are
FIGURE 5.37
Serpentronic’s main
controller board
schematic.
144