
Page 170 - Amphibionics : Build Your Own Biologically Inspired Robot
P. 170
Amphibionics 05 3/24/03 8:44 AM Page 149
Chapter 5 / Serpentronic: Build Your Own Robotic Snake
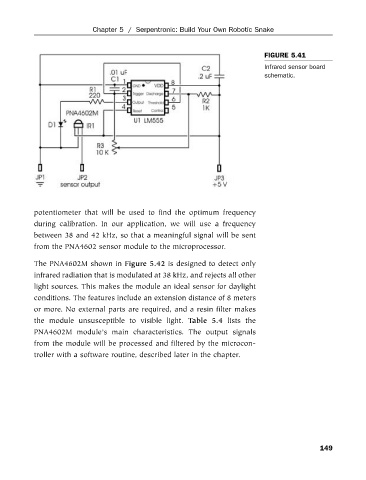
FIGURE 5.41
Infrared sensor board
schematic.
potentiometer that will be used to find the optimum frequency
during calibration. In our application, we will use a frequency
between 38 and 42 kHz, so that a meaningful signal will be sent
from the PNA4602 sensor module to the microprocessor.
The PNA4602M shown in Figure 5.42 is designed to detect only
infrared radiation that is modulated at 38 kHz, and rejects all other
light sources. This makes the module an ideal sensor for daylight
conditions. The features include an extension distance of 8 meters
or more. No external parts are required, and a resin filter makes
the module unsusceptible to visible light. Table 5.4 lists the
PNA4602M module’s main characteristics. The output signals
from the module will be processed and filtered by the microcon-
troller with a software routine, described later in the chapter.
149