
Page 318 - Amphibionics : Build Your Own Biologically Inspired Robot
P. 318
Amphibionics 07 3/24/03 9:13 AM Page 297
Chapter 7 / Turtletron: Build Your Own Robotic Turtle
In the next section, we will program the PIC 16F84 to control the
motors, interpret the information from the radio receiver module,
and obtain distance measurements from the sonar ranger for obsta-
cle avoidance and room mapping. The final experiment will be to
add an optical shaft encoder so that the robot will be able to keep
track of the distance that it has traveled. This will also be necessary
when the robot is creating maps of its surrounding environment.
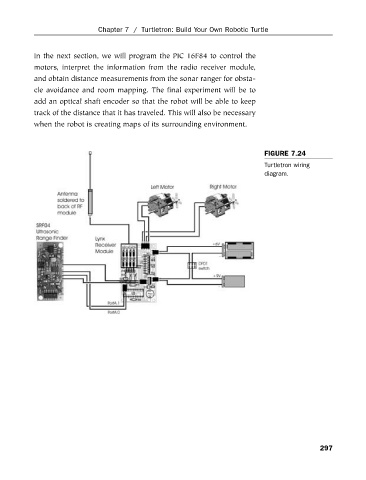
FIGURE 7.24
Turtletron wiring
diagram.
297