
Page 169 - Autonomous Mobile Robots
P. 169
Landmarks and Triangulation in Navigation 153
Initialization
SICK laser Angle and range Environment Triangulation
scanner to landmarks map and landmarks algorithm
Yes
Angle to
Rotating laser landmarks New landmark? No Kalman filter
scanner
Environment and landmarks sensor recognition Matching? updating Estimated
No
Vision
Landmark
position
Position
Sonar Yes
sensors Range to
objects Observation
prediction
Optical Position
encoders Odometry prediction
calculation
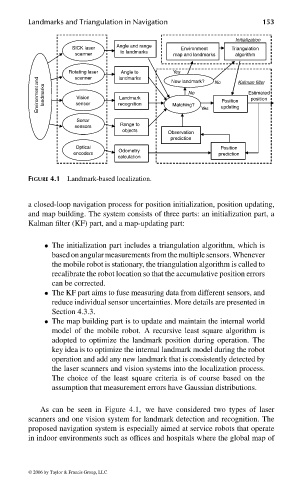
FIGURE 4.1 Landmark-based localization.
a closed-loop navigation process for position initialization, position updating,
and map building. The system consists of three parts: an initialization part, a
Kalman filter (KF) part, and a map-updating part:
• The initialization part includes a triangulation algorithm, which is
based on angular measurements from the multiple sensors. Whenever
the mobile robot is stationary, the triangulation algorithm is called to
recalibrate the robot location so that the accumulative position errors
can be corrected.
• The KF part aims to fuse measuring data from different sensors, and
reduce individual sensor uncertainties. More details are presented in
Section 4.3.3.
• The map building part is to update and maintain the internal world
model of the mobile robot. A recursive least square algorithm is
adopted to optimize the landmark position during operation. The
key idea is to optimize the internal landmark model during the robot
operation and add any new landmark that is consistently detected by
the laser scanners and vision systems into the localization process.
The choice of the least square criteria is of course based on the
assumption that measurement errors have Gaussian distributions.
As can be seen in Figure 4.1, we have considered two types of laser
scanners and one vision system for landmark detection and recognition. The
proposed navigation system is especially aimed at service robots that operate
in indoor environments such as offices and hospitals where the global map of
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c004” — 2006/3/31 — 16:42 — page 153 — #5