
Page 187 - Autonomous Mobile Robots
P. 187
Landmarks and Triangulation in Navigation 171
(a) SLSE result of batch filter
1600
1400
1200
y_axle (mm) 1000
800
600
400 Actual positions
Estimated
200
positions
0 Landmark
– 1500 – 1000 – 500 0 500 1000 1500 2000
x_axle (mm)
(b) SLSE result of recursive filter
1800
1600
1400
1200
y_axle (mm) 1000
800
600
400 Actual positions
Estimated
200
positions
0 Landmark
– 1500 – 1000 – 500 0 500 1000 1500 2000
x_axle (mm)
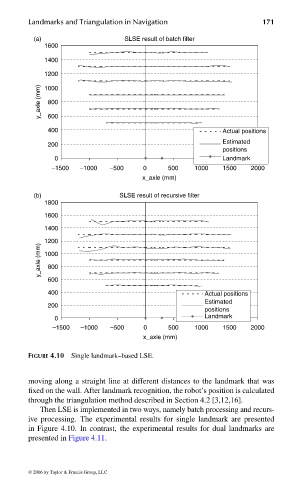
FIGURE 4.10 Single landmark–based LSE.
moving along a straight line at different distances to the landmark that was
fixed on the wall. After landmark recognition, the robot’s position is calculated
through the triangulation method described in Section 4.2 [3,12,16].
Then LSE is implemented in two ways, namely batch processing and recurs-
ive processing. The experimental results for single landmark are presented
in Figure 4.10. In contrast, the experimental results for dual landmarks are
presented in Figure 4.11.
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c004” — 2006/3/31 — 16:42 — page 171 — #23